Sono riuscito a vedere in azione questo strumento dalle dimensioni veramente ridotte, tanto ridotte che non sembra impossibile che riesca a gestire tutta la mole di dati che produce!
Iniziamo dal principio, questo strumento è un sistema per acquisizione laserscanner in mobilità dalle dimensioni e peso estremante ridotto.
È basato su tecnologia SLAM, ma i produttori ci tengono a sottolineare quanto abbiamo affinato gli algoritmi di base, integrando anche una fotocamera monocromatica per ottenere delle prestazioni migliori. L’obiettivo di questo sistema è l’acquisizione di nuvole di punti in movimento senza l’ausilio di un ricevitore GNSS per il posizionamento e calcolo della traiettoria.
Lo strumento è composto da due parti fondamentali:

- Velodyne VLP-16 nella parte superiore
- Stencil (KAARTA) nella parte inferiore
Non mi soffermo sulla Velodyne, dirò solo che è la versione entry level della linea dei loro prodotti. È anche possibile utilizzare la VLP-32 che migliora la qualità della nuvola di punti.
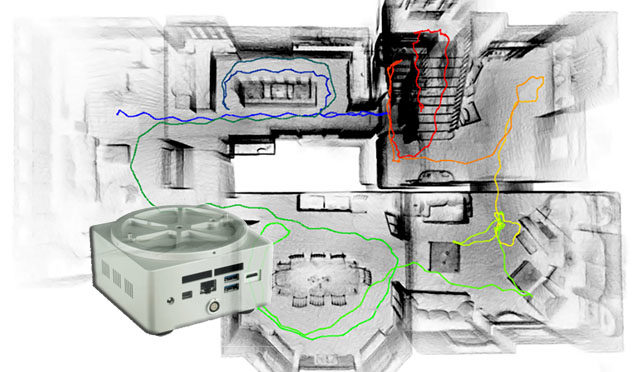
Lo Stencil è il cuore del sistema. È un computer compatto e performante, con tutte le connessioni del caso (uscita monitor per vedere la nuvola acquisita in tempo reale, tastiera e mouse per l’editing della nuvola) più sensoristica e connessione alla Velodyne.
Caratteristiche
- Adattatore compatibile con i sistemi LiDAR VLP-16 e HDL-32E
- mini HDMI
- USB3 X 2
- Ingresso: Potenza 12-19 vDC
Specifiche tecniche
- 700 grammi di peso (senza sitema LiDAR)
- MEMS IMU: 6DOF allo stato solido
- Processore i7 dual core
- Uscita: USB3 (con adattatore GigE incluso)
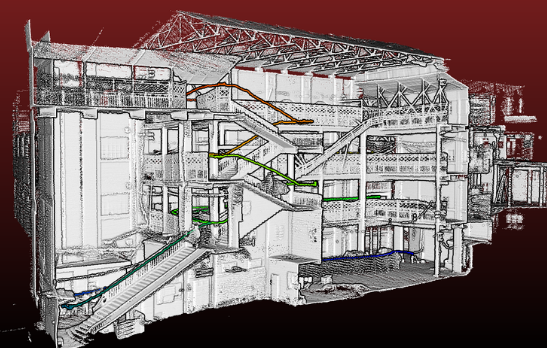
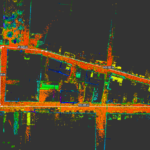
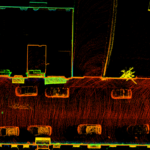
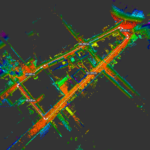
Nella prova a cui ho partecipato sono stati percorsi 450m con passo spedito. Già durante il percorso il sistema è in grado di visualizzare il risultato dell’acquisizione fino a quel punto.
Finita l’acquisizione la nuvola di tutto il rilievo è già disponibile. Quando la configurazione del rilievo è chiusa (si parte e si arriva nello stesso punto) è possibile applicare dei filtri per migliorare la registrazione della nuvola.

Fonti:
- KAARTA sito del produttore
- Microgeo – STENCIL rivenditore italiano
- Geomedia – Il sistema innovativo di rilievo mobile mapping STENCIL
- Measurement accuracy of Lidarbased
SLAM systems Report sul sistema.